a fusion of cultures
|
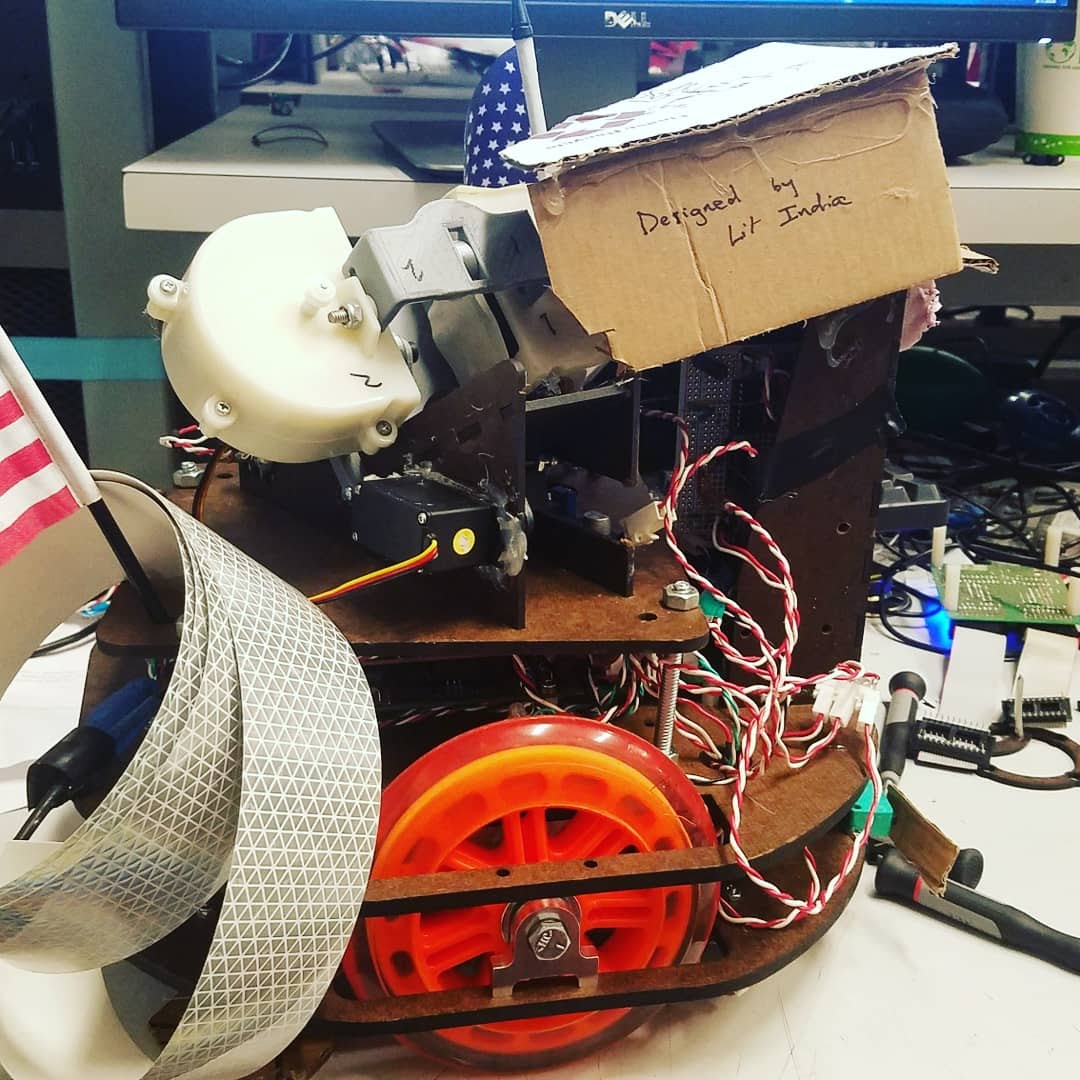
Drawing from its unique multicultural team, Team Lil India arduously toiled for three-and-a-half weeks to create an autonomous, competitive bot representative of our modern, interconnected global community
|
/robotics
|
|
Video of The Ameribot vs Stupid Bot Fan Club (ME218b 2018 Competition)
Hype Content Advisory |
competition overview |
functionality overview |
|
This year's competition (Winter 2018) is a hybrid between hockey and basketball. Robots alternate turns between offence and defense; during the offence, robots may shoot on the ground or in the air to score up to one point within a shot clock time limit. During the defense phase, robots may goal-keep or reload. Reloading is performed by interacting with an IR beacon. Teams need to emit twice the frequency of the IR signal in order to receive a ball.
The competitors start in opposite corners of the field and race to their respective loading stations to become offence first. Tiebreaks are settled by the first team to reload. The entire game takes 2 minutes and 18 seconds |
The robot moves from the corner to the black line in the middle of the field by PID motor control. The robot then line follows via tape sensors to reach the loading station. After identifying the loading station's IR frequency and emitting the appropriate response, the robot shoots from the loading station using a flywheel mechanism (OFFENCE phase), or reverses to mildly obstruct the field and to ensure a bigger emitter signal cone (DEFENCE phase).
The overall gameplan was to win face-off, consistently score during the offence phase, and then win tiebreak if need be by proximity to the loading station. |